
方案概述
研究双臂机器人作业工艺、作业技能和实现技术,研制机器人仿生试验台,面向典型行业制造工艺,揭示和挖掘人工技能作业原理、数据及模型;基于双手作业过程,研究人工作业过程中臂-腕-掌-指的运动规律,进行机器人仿生示教技术研究和系统开发,实现机器人复杂技能作业;面向不同行业,研究双臂机器人成套装备与系统,提升制造业水平,推动双臂机器人技术发展。性价比最高的ROS机器人系统,是全球ROS研究学习者引用和操作最广泛的机器人实体之一,使用者可以在机器人上进行完全的二次开发,运行自定义代码和应用程序,实现最优的性能。双臂机器人是一种典型的仿生机器人,和传统的单臂机器人相比具有更好的作业能力,能更好地完成拟人化作业。该项研究的科学意义在于揭示人工复杂作业的技能原理,为研制具有技能作业功能的双臂机器人提供理论依据。应用价值在于面向复杂作业任务,研制具有更高技能作业功能的双臂机器人应用系统,开拓机器人的应用领域,提升行业制造与作业水平,创建双臂机器人产业。
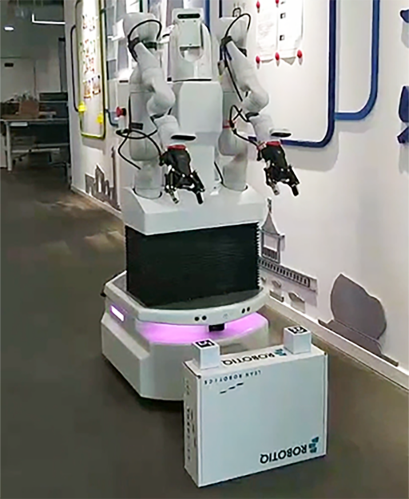
配置清单
1
移动平台
上海一坤/IR-R100
3
2
协作型机械臂
遨博智能/auboi5
6
3
电动夹具
Robotiq/G85
3
4
双目相机
RealSense/D435
3
配套实验
1
运动学基本知识实验
1
ROS基本使用-小海龟实验。
2
坐标系和DH设定实验
2
ROS消息、服务、动作的使用
3
正运动学分析实验
3
ROS传感器的配置与使用
4
逆运动学分析实验
4
RVIZ与rqt的配置与使用
5
ROS机械臂建模实验
5
ROS参数服务器使用与多机通讯
6
MoveIt 快速正运动学仿真实验
6
TF坐标变换使用与配置
7
MoveIt 快速逆运动学仿真实验
7
机器人各部件建模
8
在ROS下控制夹持器
8
串口驱动通信实验
9
MoveIt 中的夹持器结构建模
10
MoveIt 通过ROS控制夹持器

咨询电话
13761234929